CONTROLLO DI UN IMPIANTO ROBOTIZZATO DA LABORATORIO CON ISAGRAF
|
Walter Mirenda |
|
|
CONTROLLO DI UN IMPIANTO ROBOTIZZATO DA LABORATORIO CON ISAGRAF
|
|
Elaborato di Laurea (AA 2003 - 2004) |
Relatore: Prof. Luca Ferrarini |
|
Correlatore: Ing. Carlo Veber |
|
|
|
Introduzione La continua evoluzione della tecnologia dei Personal Computer e il miglioramento costante della cultura informatica hanno permesso lo sviluppo di applicazioni per la simulazione delle logiche usate nell’Automazione Industriale che si affiancano sempre più spesso ai classici PLC. Questa tecnologia viene
indicata con il termine SoftPLC che identifica un normale PC il quale,
dotato dell'opportuno software, ha la possibilità di controllare
direttamente gli I/O, sostituendosi completamente al PLC e fornendo un
ambiente di sviluppo, di
debugging e di supervisione grafico. Tra i principali PLC software
troviamo ISaGRAF, uno tra i primi SoftPLC comparsi sul mercato in grado di
supportare completamente tutti e cinque i linguaggi standardizzati per PLC
discussi nella IEC 6-1131. Un softPLC non sempre
risolvere in modo semplice ed economico problematiche di gestione
particolari quali la gestione della movimentazione di un robot. Inoltre
l’impiego dei classici moduli di ingresso e uscita digitali da abbinare
al softPLC, già per un impianto di piccole dimensioni, hanno un impatto
economico elevato. Uno degli obbiettivi è quello
di sfruttare al meglio la presenza del Personal Computer per far fronte a
questi inconvenienti, mediante lo sviluppo di un software applicativo
aggiuntivo. Grazie
alla presenza del PC, ci proponiamo di sviluppare algoritmi di utilità e
di tecniche riutilizzabili per la gestione di impianti robotizzati e per
la loro simulazione, prendendo in considerazione l’impianto prototipo da
laboratorio denominato ScaraBeo, presente nel laboratorio di Automazione
Industriale del Dipartimento di Elettronica ed Informazione (DEI) del
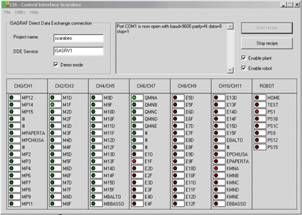
Politecnico di Milano. Altro obbiettivo è la connessione dell’impianto Scarabeo con
ISaGRAF: ciò permetterà a tutti gli studenti di apprendere e
sperimentare tutti i linguaggi di programmazione per PLC discussi nella
IEC 6-1131, mettendo loro a disposizione ambienti di sviluppo, simulazione
e verifica grafici ed un impianto reale su cui valutarne direttamente
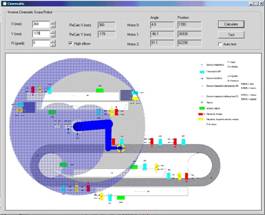
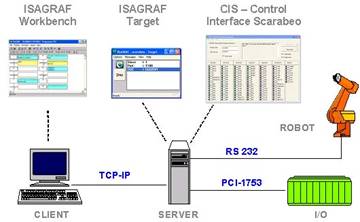
l’efficacia. Progetto e realizzazione Il progetto tramite lo sviluppo di CIS - Control Interface ScaraBeo realizza
Il software CIS è stato sviluppato su piattaforma Windows Xp e 2000; l’ architettura software dell' applicazione segue il paradigma ad oggetti, il linguaggio scelto per lo sviluppo è C++. L' architettura Client-Server del sistema di controllo visibile in figura è particolarmente utile in un contesto di Telelaboratorio.
Conclusioni e sviluppi futuri L’applicazione realizzata è basata su un’accurata analisi dell’impianto, che ha portato alla sua suddivisione in unità funzionali. L’ applicativo sviluppato è diviso in moduli in base alle unità individuate secondo il paradigma ad oggetti, per facilitare la lettura, la comprensione del codice ed un’eventuale espansione dello stesso. Le
scelte adottate per l’implementazione sono risultate idonee allo scopo
nonostante l’economicità della realizzazione. Le prestazioni del
sistema sono buone con tempi di ciclo ridotto e velocità di esecuzione
del robot più che soddisfacente. Ottimi anche i risultati ottenuti con
l’ambiente di simulazione integrato. Tra gli sviluppi futuri di
rilievo:
|
|
E' disponibile il filmato con l'impianto Scarabeo in funzione, controllato da CIS ed ISaGRAF.
Download ScaraBeo320.WMV (4.5Mb)